说明: 这个帖子是根据tutm发的“再谈分光光度计的发展趋势”和他给的一些文档及网络上收集的一些资料整理的,以方便大家比较系统的了解。大家可以跟贴讨论,我再整理。由于一个贴发不下,分了两贴。
一。光学振镜特点:光学振镜。这是一种高速扫描的器件,在激光打标设备上早已成熟应用。它机构简单体积小(根本不需要一大堆什么正弦机构之类),定位精度高(定位角偏差约2秒),扫描速度极快(ms级),成本也并不高。据有关资料介绍,核聚变中高速多波段紫外光谱检测已有使用。
二。光学振镜系统(一)光学振镜工作原理(摘自文献1):
振镜是一种优良的矢量扫描器件。它是一种特殊的摆动电机 ,基本原理是通电线圈在磁场中产生力矩 ,但与旋转电机不同 ,其转子上通过机械纽簧或电子的方法加有复位力矩 ,大小与转子偏离平衡位置的角度成正比 ,当线圈通以一定的电流而转子发生偏转到一定的角度时 ,电磁力矩与回复力矩大小相等 ,故不能象普通电机一样旋转 ,只能偏转 ,偏转角与电流成正比 ,与电流计一样 ,故振镜又叫电流计扫描器(galvanomet ric scanner) 。
振镜扫描系统的原理图如下:
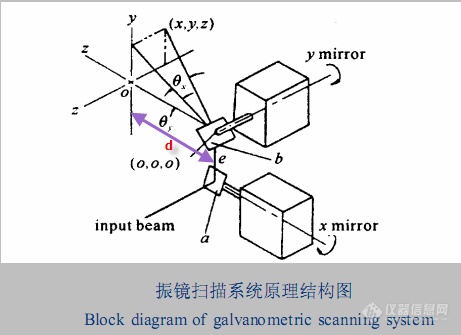
![]() 图1 振镜扫描系统原理图
图1 振镜扫描系统原理图图1中, a ,b 是振镜,通过转动振镜a和b可以使入射光束投影到XY平面的指定位置。
具体x,y的坐标计算公式如下(符号如图1中所示):
设 x 轴和y 轴反射镜之间的距离为e , y 振镜的轴线到视场平面坐标原点的距离为 d ,当 x , y 轴的光学偏转角分别为θx 和θy 时,视场平面上相应光点坐标为( x , y) ,且当 x = y = 0 时,θx =θy = 0 ,则
![]() 图2 x ,y的坐标计算公式
图2 x ,y的坐标计算公式振镜a,b的偏转角θx 和θy与振镜a,b的控制电压Vx和Vy的关系为:
θx = kx×Vx
θy = ky×Vy
其中,kx,ky是系数。
所以通过控制Vx和Vy就可以控制振镜a,b的偏转角度。
在网络上一篇文章里看到,有些振镜是由步进电机驱动的,那么V x和V y就是步进电机的控制电压。
(二)光学振镜系统
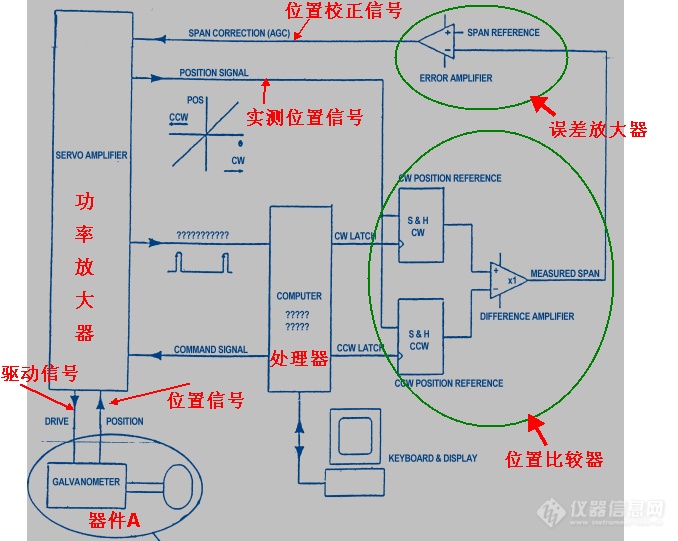
光学振镜系统是一种由驱动板与高速摆动振镜组成的一个高精度、高速度伺服控制系统。如图3所示。
光学振镜系统一般是由位置传感器,位置区分器,误差放大器,功率放大器,处理器组成的闭环控制系统。
如下图:
![]() 图3 光学振镜系统
图3 光学振镜系统其中的器件A为下图
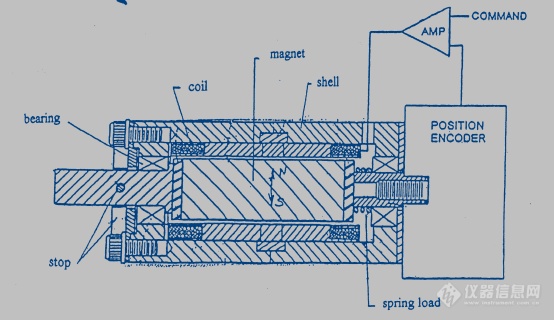
![]() 图4 图3中器件A的解剖图
图4 图3中器件A的解剖图图中的spring load大概就是上面光学振镜原理里说的机械扭簧来施加复位力矩。
注:图3和图4见参考文献3的第8部份,417页
三。光学振镜的参数![]() 图5 光学振镜的参数
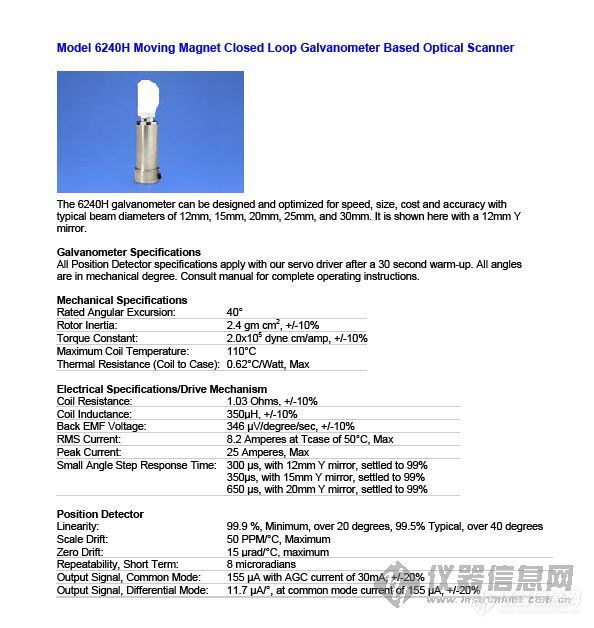
图5 光学振镜的参数图5给出了光学振镜的机械参数,电参数,位置检测器的参数
可以看到,
光学振镜的转动角度最大是40度,这个影响光谱扫描的范围。
电参数中,
线圈驱动电流,RMS值为8.2A,峰值电流是25A, 好大啊。 一般检流计都是用于uA级的,这么大!这也许就是振镜系统输出力矩大的原因。
小角度阶跃响应时间,对12mm振镜是300uS, 其中settled to 99%不知道什么意思。它这个振镜的大小好像是根据入射光束的直径来区分的,也就是说不同的振镜,对入射光束有要求。在图5上面有这句话:typical beam diameters of 12mm, 15mm,20mm.....。 这也反映了,振镜的特点,扫描速度极快。
位置检测器参数中,
比例漂移(scale drift),50PPM/℃,不知道什么意思。
零点漂移(zero drift),15urad/℃,受温度的影响。
重复性 ,8 urad,这个应该决定了定位精度,算下来是1.5秒,所以定位精度高。这个参数也影响光谱分辨率。
四。光学振镜的应用(一)光学振镜的应用
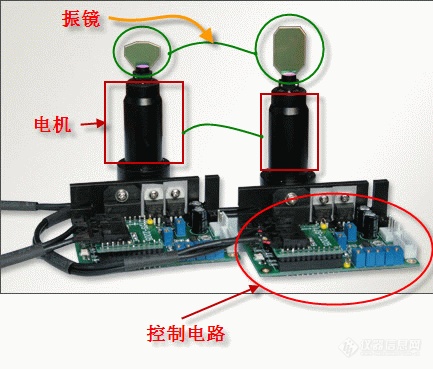
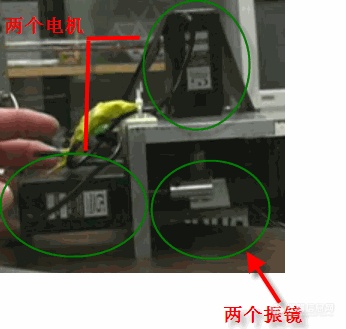
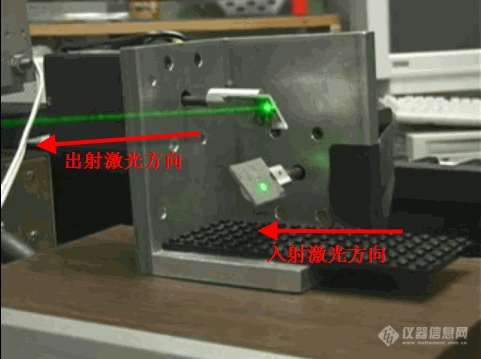
光学振镜是一种很成熟的光路扫描器件,现在一些双光束分光光度计中有应用,主要用于光路切换,速度极快。工作时步进动作看上去象在高速振动,大概因此叫振镜吧。最成熟的应用是激光扫描,象舞台激光图案显示等演出场合。主贴下面的图片就是它的外形和驱动电路。本帖下面的图是它用于激光打标的原理图。
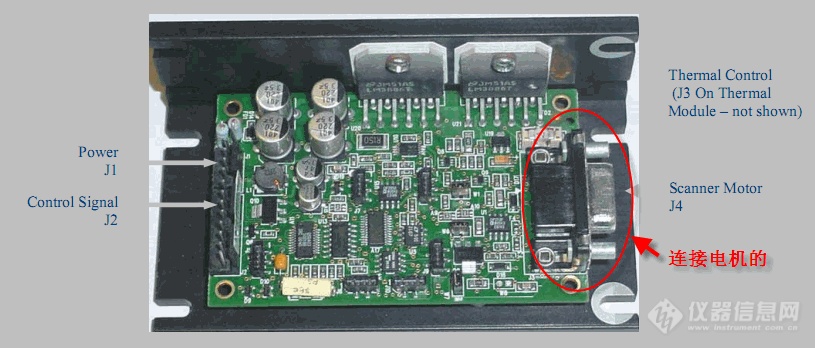
![]() 图6外形和驱动电路
图6外形和驱动电路注:图6中的控制电路就是图3中的servo amplifier。
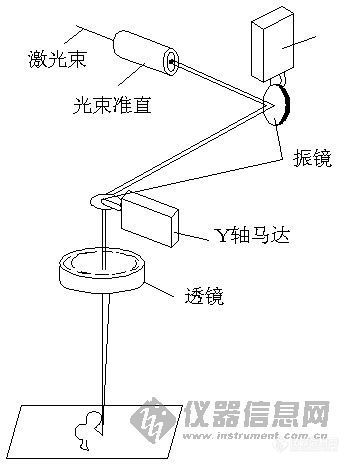
![]() 图7激光打标的原理图
图7激光打标的原理图