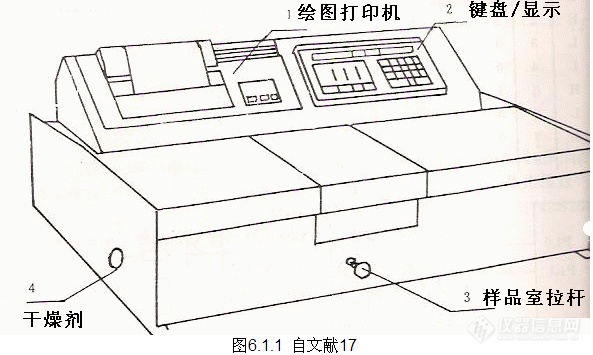
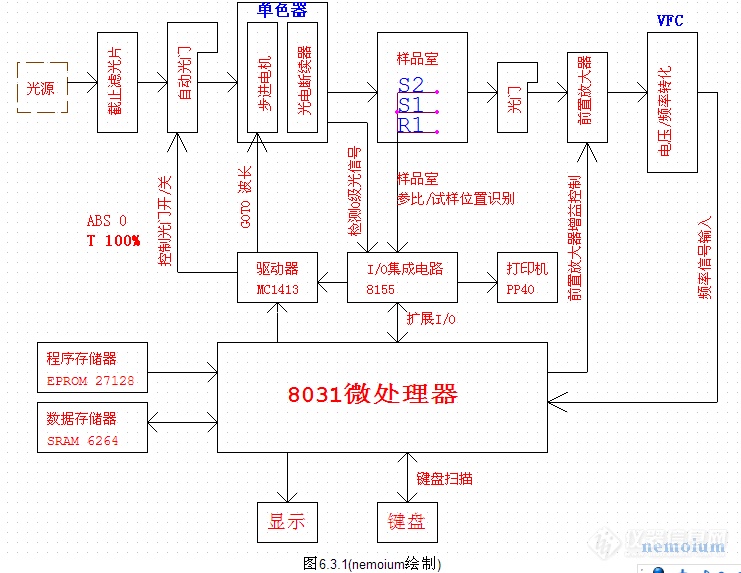
第三节 仪器如何全波长自动调整100%基线
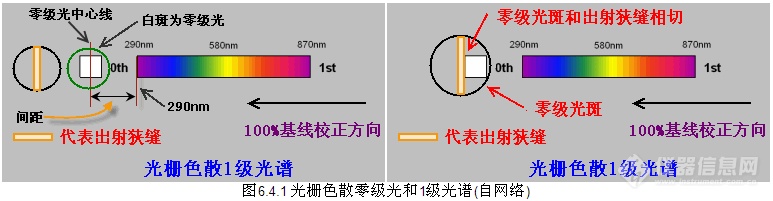
仪器在确定了光栅光谱1级光谱各个谱线的步进数(各个谱线的位置)后,开始执行100%线校正。100%线每1nm校正一点。•
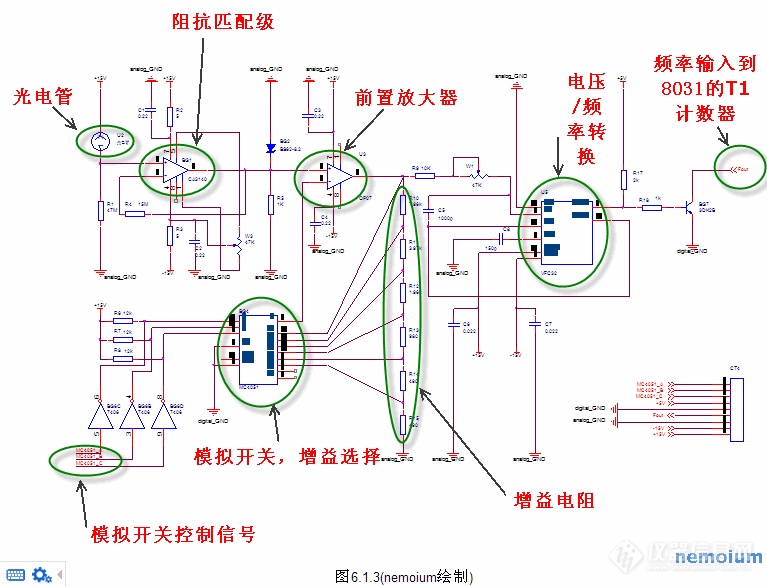
由于光源、光栅、反射镜、光电管光谱灵敏度的影响使仪器光谱能量分布存在很大差异,为了是在各个波长情况下仪器的能量达到平衡及实现阻抗变换,仪器设置了阻抗转换级与自动增益控制级组成的前置放大级。
一。阻抗转换级
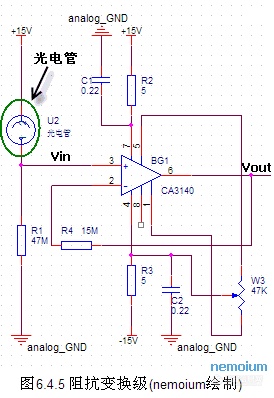
由于光电管的内阻高达几百MΩ,所以用高输入阻抗运算放大器CA3140(输入阻抗高达1.5TΩ)接成一电压跟随器,以变换光电管的高输出阻抗,实现阻抗匹配,如图6.4.5。CA3140在酸度计中也用的非常普遍,PH电极由于高输出阻抗,所以电路前级也必须进行阻抗转换。
![]()
二。自动增益控制
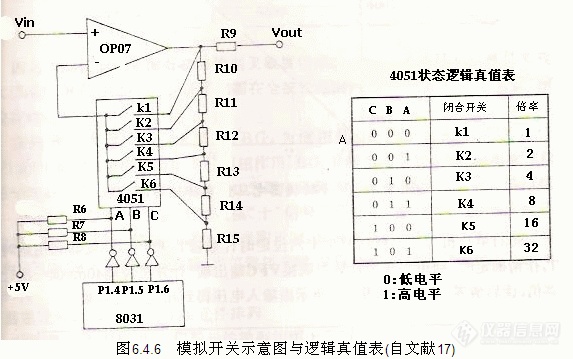
自动增益控制由运算放大器OP07,集成模拟开关4051组成。经上面阻抗匹配电路输出的信号,送到增益放大器OP07进行放大,给A/D转换器提供合适的输入电压。
OP07作为放大环节,其闭环输入电阻及反馈电阻由R10~R15复合组成,如图6.4.6。通过模拟开关4051的不同开、关状态,得到6组不同的输入电阻及反馈电阻,开关档位越高其分压越大,反馈量越小,增益越大(见图6.4.6中4051状态逻辑真值表),控制开关档位就达到了自动增益控制。模拟开关4051的选择端A、B、C由微处理器8031的P1.4、P1.5、P1.6输出控制。
![]()
微处理器根据仪器在每个波长条件下测定经V/F转换后的能量判断是否达到一限定值,如能量太小,增益控制器就加大倍率,从K1级到K6级,当测得能量值太大时,就减小倍率值,从K6到K1逐级降低,从而达到自动增益控制目的,使仪器在全波长范围内100%大致相同。
自动增益控制是在“参比“槽位完成的,当槽位为“样品”槽位时,增益不变,从而输出的T值经VFC转换后送微处理器与100%值比较,输出T%。
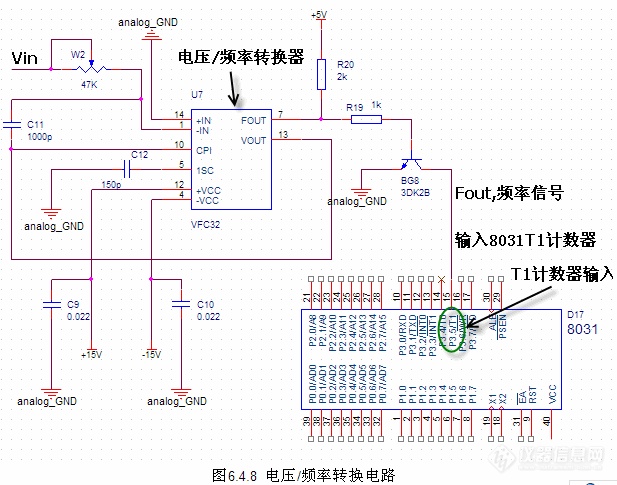
三。电压/频率转换级
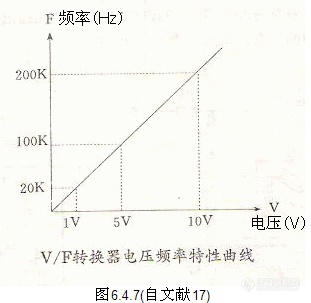
电压/频率转换芯片VFC32的特性如图6.4.7,对应某一输入电压,就有相应大小频率的脉冲输出。
![]()
微处理器内有两个十六位定时计数器T0和T1,仪器利用定时器T0作为精确定时,利用T1作为计数器连接VFC32的输出段Fout,如图6.4.7。微处理器每隔40ms读一次计数器,读后清零,如下表1。这样根据40ms内计数的脉冲数,就可以换算出输入电压大小。
![]()
从表6-4-1可以看出,脉冲数越大,对应的输入电压越大,表明光电管接收的光能量越大,透过率越大。
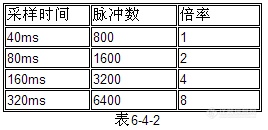
显然,增大8031计数的脉冲数的方法有2个,增大VFC32输出频率,表6-4-1所示;另一种是可以延长计数时间,如果我们从40ms增大到80ms呢,显然对相同的频率,脉冲数增大一倍,通过软件的方法,增大对信号的分辨率,如表6-4-2所示。增大计数时间是8031通过软件实现的,所以表6-4-2这种方法又叫软件增益。
![]()
仪器一方面通过4051控制灵敏度倍率1~32倍,另外通过软件实现放大倍率1~8 倍,共256倍,保证仪器在全波长范围内100%大致相同。如果256倍,光能量仍不能在合适的值时,仪器判定光能量太低。
![]()