1. 虚拟机器人原型![]()
虚拟机器人原型
通过模拟系统,邦加尔德创作出一种虚拟机器人,这种虚拟机器人可以随着时间的变化改变自己的形状。最初,这种机器人身体像蛇一样,没有腿,靠腹部运动。邦加尔德的模拟系统根据机器人脊骨的每一个片断采用了各种不同的运动算法。如果某种算法能够成功地让机器人更接近目标,就会被应用于下一个片断。如果不成功,则被舍弃。在每个片断中,成功的算法还将会随着片断的轻微修正进行验证。当各种不同算法分别成功地适应各脊骨片断的运动时,机器人就已进化出有效的运动模式。
腹部运动功能进化成功后,邦加尔德开始为机器人增加腿部。随着腿部的缓慢“生长”,模拟系统中的虚拟机器人的腿部运动开始从滑行到步行进化。邦加尔德介绍说,“缓慢生长的腿部使得算法(控制器)以机器人的语言去处理一个问题,即首先能够摆动,然后再实现平衡。这种步行控制器与我们以前看到的有所不同。”这样它就逐渐学会了如何更快地行走,并最终掌握了更加自然的步法
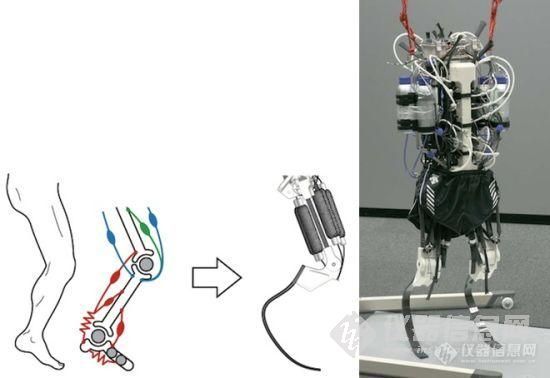
当然,在现实世界中很难让机器人改变它们的身体或让其腿部生长,但邦加尔德利用乐高机器人研制出一个概念验证版机器人。这款机器人拥有一个简单的脊骨和四条腿。最初,一个额外的支柱帮助四条腿像蜥蜴一样向外伸展,然而逐渐将它们收拢,最终机器人可以用腿站立起来。邦加尔德表示,这一原型显示,真实的机器人也可以利用相似的过程进化出有效的步法。