北京时间9月22日消息,最近美国的工程师们迈向昆虫仿生学微型飞行机器人研制的方向上又迈出了关键性步骤,离完全自主飞行的目标又进了一步。日前他们首次对外界展示了一台采用闭合线路控制的微型飞行机器人执行垂直飞行的情况。研制人员预计,他们借以控制垂直方向的方法也将最终帮助他们实现在全部三个轴向上实现自主操控。
来自哈佛大学微型机器人实验室的研制小组日前在最新一期的《生物灵感与仿生学》杂志上发表了他们有关世界第一种“可控仿生学垂直飞行机器人”的相关论文。他们采用的创新方法将有助于未来开发完全自治的,拥有灵活飞行能力的微型机器人。
研制小组成员佩雷兹·阿兰西比亚(Pérez-Arancibia)告诉记者说:“基本上,一个完全自治的微型飞行机器人可以做几乎所有一只普通蜜蜂或苍蝇能做的事情:起飞,降落或者在复杂环境中飞行。在未来,我设想这种微型机器人还将学会自我调整以适应周遭环境,并与其它飞行机器人相互协作完成复杂任务使命,甚至和真正的昆虫之间相互交流。这一定很酷!”
尽管他们说的轻松,真正制造一个完全自治的卫星飞行机器人可绝非易事:空气动力学,传感器,微型马达,以及其他诸多因素必须进行综合考虑。为了简化问题,研制人员们决定首先将注意力集中于一个问题上:飞行高度控制。
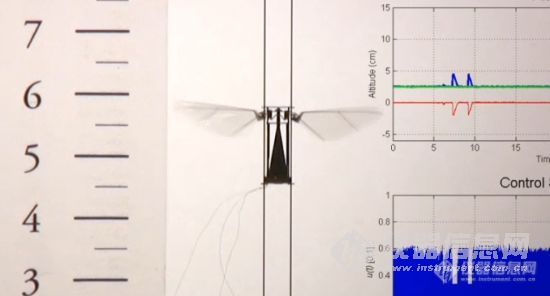
于是他们设计了一台采用仿生学振翅模式飞行的,重量仅有56毫克的微型飞行机器人,并将其限制在一个只能上下两个方向移动的空间内。飞行器通过拍动翅膀获得升力,它振动翅膀频率越高,升力就越大。